Robot navigation using human cues: A robot navigation system for symbolic goal-directed exploration
30 May 2015







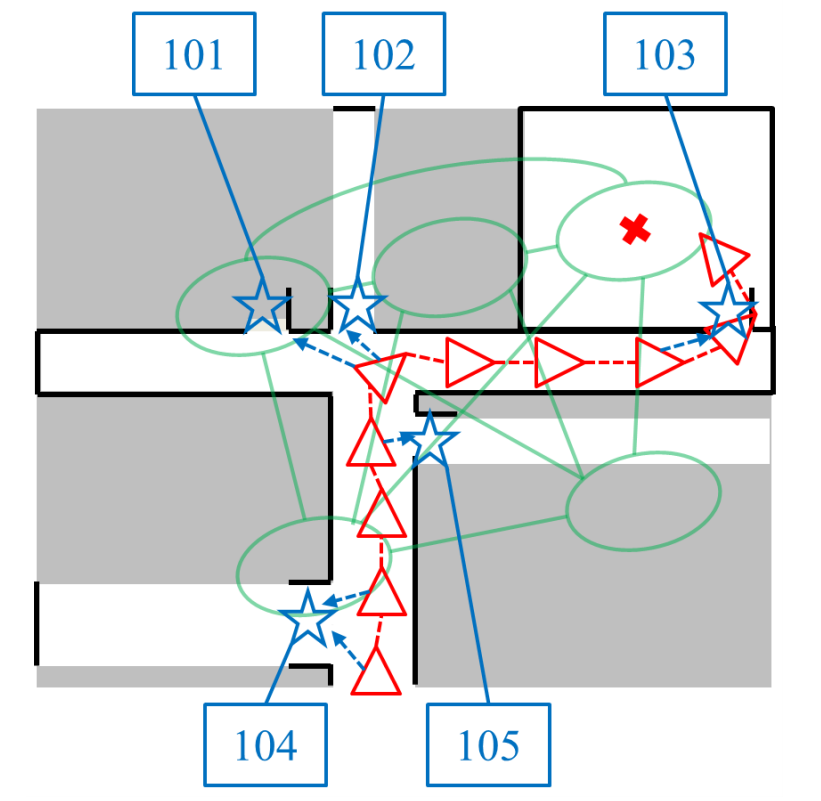
In this paper we present for the first time a complete symbolic navigation system that performs goal-directed exploration to unfamiliar environments on a physical robot. We introduce a novel construct called the abstract map to link provided symbolic spatial information with observed symbolic information and actual places in the real world. Symbolic information is observed using a text recognition system that has been developed specifically for the application of reading door labels. In the study described in this paper, the robot was provided with a floor plan and a destination. The destination was specified by a room number, used both in the floor plan and on the door to the room. The robot autonomously navigated to the destination using its text recognition, abstract map, mapping, and path planning systems. The robot used the symbolic navigation system to determine an efficient path to the destination, and reached the goal in two different real-world environments. Simulation results show that the system reduces the time required to navigate to a goal when compared to random exploration.
Related Links
© Ben Talbot. All rights reserved.