Integrating Symbolic Spatial Information in Robot Navigation
21 September 2018

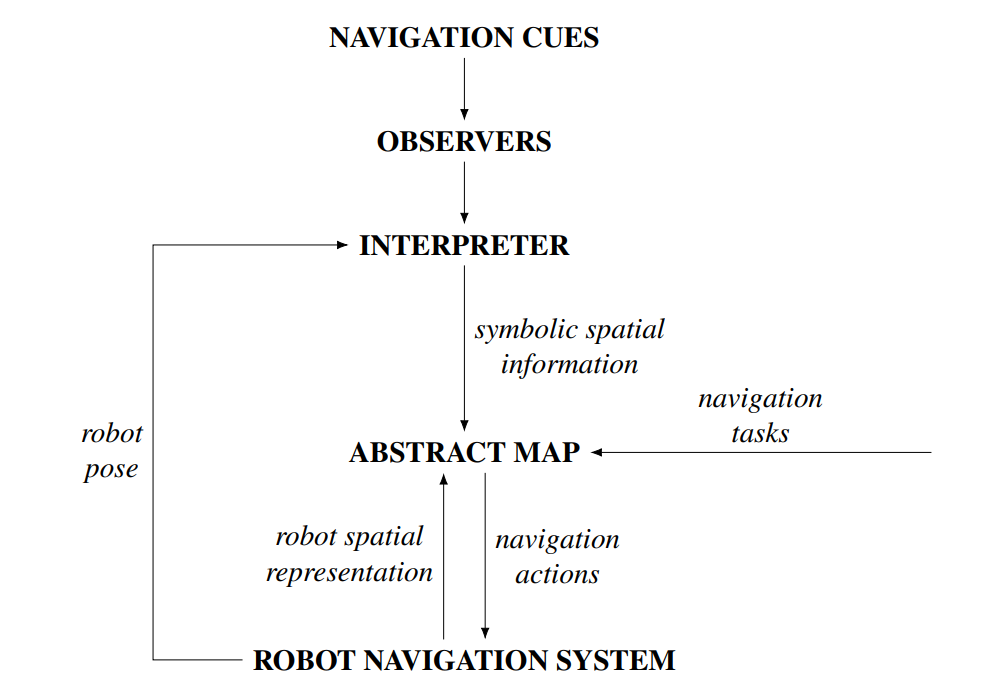
Navigation cues – like labels, signs, maps, planners, spoken directions, and navigational gestures – provide humans with navigation capabilities that far surpass those of mobile robots. This thesis demonstrates how a mobile robot can use the symbolic spatial information embedded in navigation cues to proficiently navigate unseen built environments. The primary contributions of the thesis reside in the abstract map, a novel tool for grounding navigation symbols. The abstract map imagines abstract layouts and structures for unseen spaces through a mechanical analogy, then tethers the abstract spatial models with robot perceptions to inform navigation to symbolic goals in built environments.
Related Links
© Ben Talbot. All rights reserved.