Robot Navigation in Unseen Spaces using an Abstract Map
1 September 2020




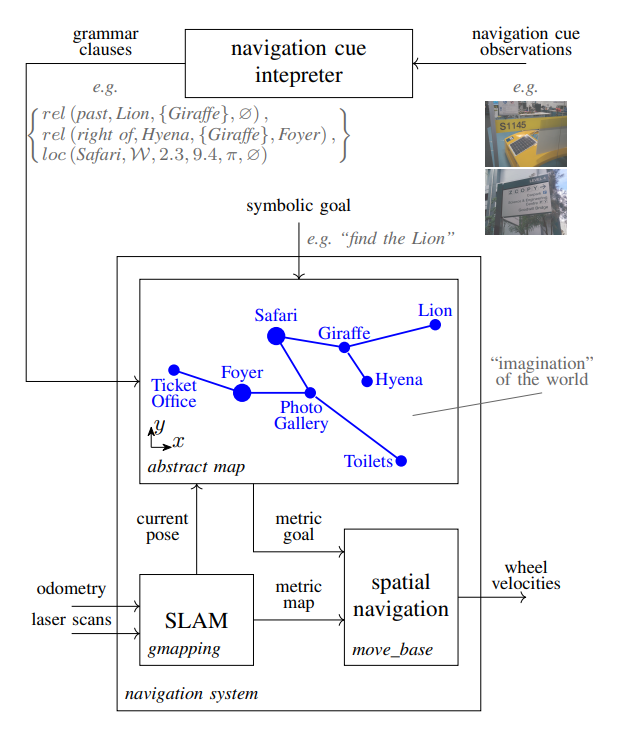
Human navigation in built environments depends on symbolic spatial information which has unrealised potential to enhance robot navigation capabilities. Information sources such as labels, signs, maps, planners, spoken directions, and navigational gestures communicate a wealth of spatial information to the navigators of built environments; a wealth of information that robots typically ignore. We present a robot navigation system that uses the same symbolic spatial information employed by humans to purposefully navigate in unseen built environments with a level of performance comparable to humans. The navigation system uses a novel data structure called the abstract map to imagine malleable spatial models for unseen spaces from spatial symbols. Sensorimotor perceptions from a robot are then employed to provide purposeful navigation to symbolic goal locations in the unseen environment. We show how a dynamic system can be used to create malleable spatial models for the abstract map, and provide an open source implementation to encourage future work in the area of symbolic navigation. Symbolic navigation performance of humans and a robot is evaluated in a real-world built environment. The paper concludes with a qualitative analysis of human navigation strategies, providing further insights into how the symbolic navigation capabilities of robots in unseen built environments can be improved in the future.
Related Links
© Ben Talbot. All rights reserved.