OpenSeqSLAM2.0

Commenced
26 March 2017
Last updated
4 February 2021
1 August 2017
First planning meeting for OpenSeqSLAM2 project
8 December 2017
Alpha release, shared internally in QUT's robotics group (v0.1.0)
26 March 2017
Stable version released, used internally for comparative visual place recognition experiments (v1.0.0)
6 April 2017
Released publicly for the first time (v2.0.0)
1 October 2018
Toolbox published in proceedings of IROS 2018
4 February 2021
Migrated to GitHub, and added to QCR's open source portfolio (v2.0.1)
OpenSeqSLAM2.0 is a MATLAB toolbox that allows users to thoroughly explored the SeqSLAM method for addressing the visual place recognition problem. The visual place recognition problem is centred around recognising a previously traversed route, regardless of whether it is seen during the day or night, in clear or inclement conditions, or in summer or winter. Recognising previously traversed routes is a crucial capability of navigating robots.
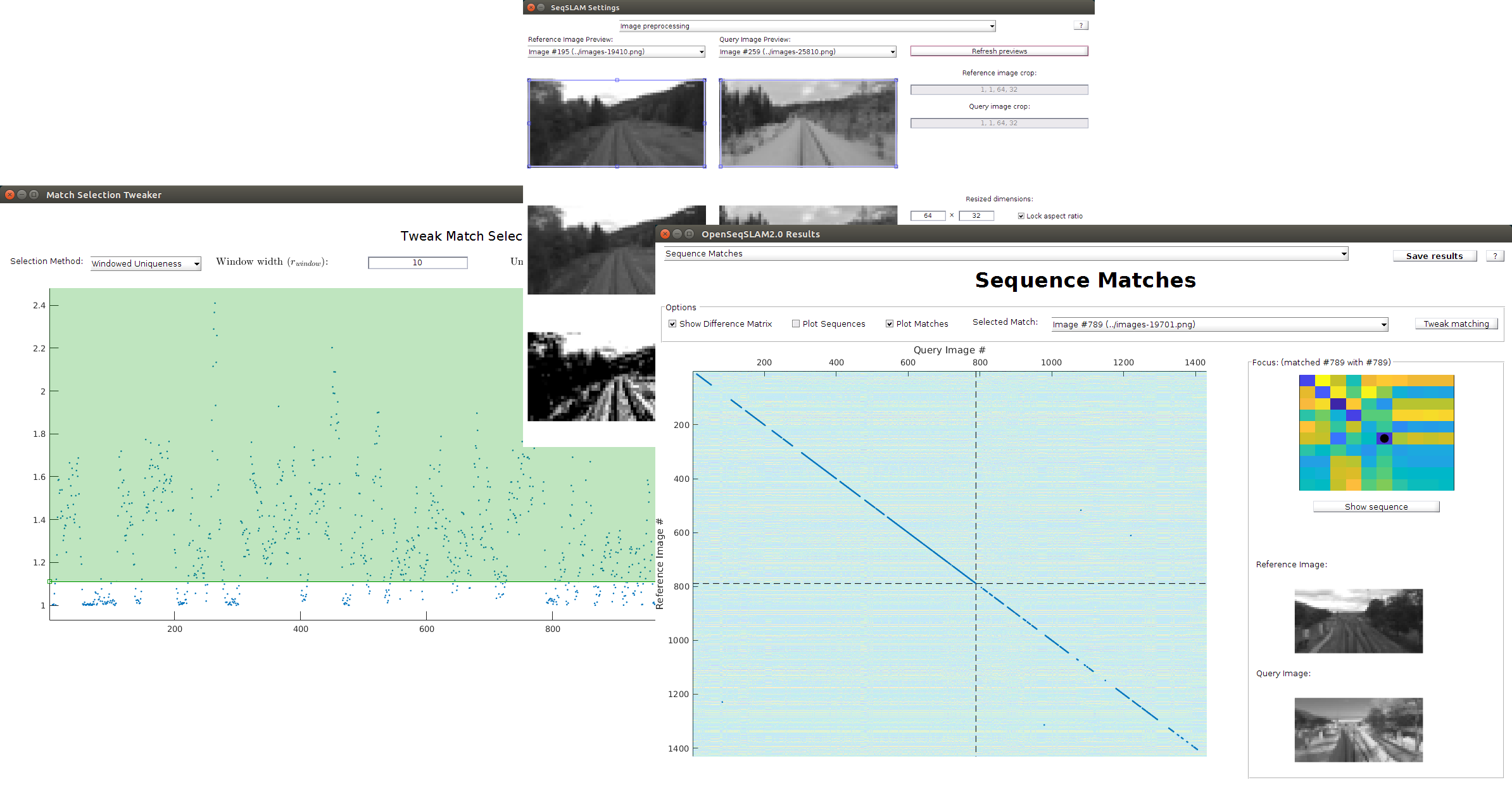
The toolbox provides a number of easy-to-use graphical interfaces that allow users to interactively learn about the SeqSLAM algorithm by exploring and playing with its underlying behaviour. Through visual GUIs users are able to:
- explore a number of previously published variations to the SeqSLAM method (including search and match selection methods);
- visually track progress;
- interactively tune parameters;
- dynamically reconfigure matching parameters while viewing results;
- explore precision-recall statistics;
- visualise difference matrices, match sequence images, and image pre-processing steps;
- view and export matching videos;
- automatically optimise selection thresholds against a ground truth;
- sweep any numeric parameter value through a batch operation mode; and
- operate in headless mode with parallelisation available.
The toolbox is open-source and available on GitHub. See the links below for further details.
Contributors


Supporters
© Ben Talbot. All rights reserved.